
MOTHERSHIP - A Serpentine Tread/Limb Hydrid Marsupial Robot
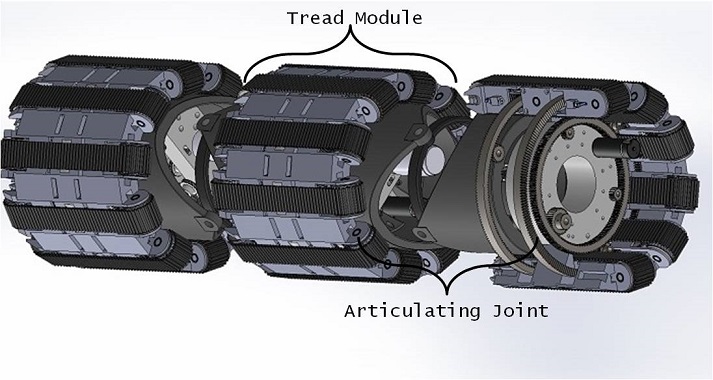
MOTHERSHIP is a tread/limb hybrid robot that uses treads as the primary mode of locomotion, augmented by active limb-like joints that articulate the discrete tread modules. The tread modules are then connected in a serpentine configuration by these limb-like joints so there is a “head” and a “tail.” What is novel about MOTHERSHIP is the 2-D tread modules we have developed. Each tread module can move longitudinally along the tread direction, like a bulldozer, and also transversely, perpendicular to the tread direction. When connected in the serpentine configuration, the entire robot becomes holonomic, meaning it can instantaneously move in any direction.
Dual-Use Robots for Emergency Response and Handling of High-Consequence Materials

A common problem with emergency response robots is their relatively sparse use makes them difficult to use in low-likelihood scenarios. On a complex piece of equipment, most repsonders are given about 40 hours of initial trianing and then about 8 hours of annual refresher. For a commplex device that might not be used even once per year, thsi may not be sufficient for striong familiarity and ease of use. Responders may shy away from unfamiliar equipment under high-stress situations. So, a solution is dual-use of emergency response robots for more common tasks such as routine maintenance or inspection.
The Collaborative Robotics Lab teamed with Howie Choset's Biorobotics Lab at Carnegie Mellon to demonstrate modular robots at the DOE Science of Safety challenge. The Science of Safety Challenge resulted from a joint DOE/NAF sponsored workshop on the Robotic Handling of High-Consequence Materials (NSF 1550326-OISE).
Publications
Voyles R, Abbaraju P, Choset H and Ansari A, 2017, "Novel Serpentine robot combinations for inspection in hard-to-reach areas of damaged or decommissioned structures-17335," Proc., Waste Management Conf. (WM2017)
R.M. Voyles and R. Godzdanker, "Side-Slipping Locomotion of a Miniature, Reconfigurable Limb/Tread Hybrid Robot," in IEEE Workshop on Safety, Security and Rescue Robots, Sendai, Japan, Oct., 2008, pp. 58-64.